ð═╠û(h¿ño)ú║sold-cbxs-cndx-o
Á┌1ı┬ ¤Á¢y(t¿»ng)║å(ji¿ún)¢Ú
1.1 ¼F(xi¿ñn)ê÷(ch¿úng)©┼╩÷
íííí┤¼▓░¤┬╦«╩ÃÈý┤¼▀^│╠ÍðÊ╗éÇ(g¿¿)ÍÏʬÙAÂ╬Á─ÌD(zhu¿ún)ôQ,ÊÓ╩ÃÊ╗éÇ(g¿¿)ÿ╦(bi¿ío)Í¥ðÈÙAÂ╬�����íú╦³Á─Ã░Ê╗ÙAÂ╬È┌ÛæÁÏ╔¤Á─┤¼┼_(t¿ói)╗‗╦«Íð┤¼ë]╩®╣ñ���ú¼«ö(d¿íng)┤¼▓░¢¿Èý╣ñ│╠┤¾▓┐ÀÍ═Û╣ñÍ«║¾����ú¼îó┤¼▓░Å─¢¿Èýà^(q¿▒)ÊãÍ┴╦«Ë‗à^(q¿▒)╝┤×Ú¤┬╦«����íú¤┬╦«ÊÔ╬ÂÍ°┤¼▓░¢¿ÈýÊÐ═Û│╔┴╦ÛP(gu¿ín)µIðÈ╣ñθú¼¤┬╦«Ã░Á─┤¼▓░¶©Ðb═Û╣ñ┴┐═¨═¨┐╔▀_(d¿ó)70úÑí½80úÑ����ú¼╔§Í┴│¼▀^95úÑíú░┤┤¼▓░¤┬╦«È¡└Ý┐╔ÀÍ×Úú║ÍÏ┴ª╩¢¤┬╦«����íó㻩í╩¢¤┬╦«íóÖC(j¿®)ðÁ╗»¤┬╦«║═ÜÔ─Ê╩¢¤┬╦«╦─┤¾¯É���íú
a. ÍÏ┴ª╩¢¤┬╦«╩Ã┤¼▓░È┌▒¥╔ÝÍÏ┴ªÁ─θË├¤┬�ú¼Å─┤¼┼_(t¿ói)╔¤ÐÏ╗¼Á└ÍØu¤‗╦«ÍðÊãäË(d¿░ng)╩╣┤¼©íãÁ─À¢À¿��íúÍÏ┴ª╩¢¤┬╦«ËÍÀÍ┐v¤‗═┐Ë═╗¼Á└¤┬╦«íó┐v¤‗õôÍÚ╗¼Á└¤┬╦«║═ÖM¤‗═┐Ë═╗¼Á└¤┬╦«╚²ÀN�íú
b. 㻩í╩¢¤┬╦«Ë├╦«▒├╗‗ÎÈ┴¸À¢╩¢░Ð╦«Îó╚ÙÈý┤¼Á─╦«│Ï└´Ê└┐┐┤¼▓░ÎÈ╔ÝÁ─©í┴ªîó┤¼©íãÁ─¤┬╦«À¢╩¢íúÊ╗░Ò×ÚÈý┤¼ë]¤┬╦«�íú
c. ÖC(j¿®)ðÁ╗»¤┬╦«└¹Ë├¥ÝôP(y¿óng)ÖC(j¿®)╗‗ãõ╦¹Ðbéõîó┤¼▓░Å─¢¿Èýã¢┼_(t¿ói)╦═╚Ù╦«Íðíú
d. ÜÔ─Ê╩¢¤┬╦«└¹Ë├©▀ë║│õÜÔ¤─zÜÔ─Ê│ðô·(d¿ín)┤¼▓░ÎÈÍÏ�����ú¼═¿▀^ÜÔ─ÊÁ─ØLäË(d¿░ng)Îâð╬╝░┤¼▓░ÎÈÍÏ¢Y(ji¿ª)║¤ã¢┼_(t¿ói)ã┬Â╚╩╣┤¼▓░Ýÿ└¹¤┬╦«���íú
íííí┤¼▓░Á─╔¤Âıíó¤┬╦«ÈO(sh¿¿)éõ┼cÈO(sh¿¿)╩®À┤Ë│┴╦Ê╗éÇ(g¿¿)┤¼ÅSÁ─╔·«a(ch¿ún)─▄┴ª���ú¼Ê▓øQ¿┴╦┤¼ÅS╦¨─▄¢¿Èý┤¼▓░Á─Á╚╝ë(j¿¬)┤¾ðí�����íóÍÏ┴┐�íóÚL(zh¿úng)Â╚╝░┤¼ð═����íúÊ‗┤╦╔¤Âı║═¤┬╦«ÈO(sh¿¿)éõíóÈO(sh¿¿)╩®▒╗ÀQÍ«×Ú┤¼ÅSÁ─Ð╩║Ý�íúÙSÍ°┤¼▓░çì╬╗Á─╠ß©▀�ú¼▓╗╩Ã║å(ji¿ún)å╬ÁÏÈ÷╝Ë¥ÝôP(y¿óng)ÖC(j¿®)���íóð▒╝▄▄çöÁ(sh¿┤)┴┐║═╠ß©▀─▄┴ªÁ─åû¯}���ú¼Â°╩Ã¥ÝôP(y¿óng)ÖC(j¿®)╚║Á─═¼▓¢àf(xi¿ª)ı{(di¿ño)åû¯}íú╩ß╩¢╗¼Á└Ùè┴ª═¤äË(d¿░ng)¥ÝôP(y¿óng)ÖC(j¿®)╚║Á─═¼▓¢┼cÀ±Í▒¢ËË░ÝæÁ¢¤ÓÛP(gu¿ín)╣ñÿI(y¿¿)╔·«a(ch¿ún)Á─░▓╚½�ú¼▓óÃÊÙSÍ°¥ÝôP(y¿óng)ÖC(j¿®)═¤┴ªÁ─╠ß©▀║═¥ÝôP(y¿óng)ÖC(j¿®)öÁ(sh¿┤)┴┐Á─È÷╝Ëú¼îª(du¿¼)¥ÝôP(y¿óng)ÖC(j¿®)═¼▓¢ðÈÁ─ʬþȢüÝÈ¢ÍÏʬ�íúË╔Ë┌ÂÓ┼_(t¿ói)¥ÝôP(y¿óng)ÖC(j¿®)═¼òr(sh¿¬)θÿI(y¿¿)┤µÈ┌▓╗═¼▓¢åû¯}°╩╣┤¼▓░ã½ð▒ú¼Ë░Ýæ┤¼▓░╔¤¤┬ã┬░▓╚½�����íú
íííí×Ú┤_▒ú┤¼ÅS│ð¢ËÁ─┤¾ð═┤¼▓░░▓╚½Ýÿ└¹¤┬╦«�����ú¼©─Îâ鸢y(t¿»ng)Á─╩ß╩¢╗¼Á└Í╗▀mË├Ë┌Íððíð═┤¼▓░╔¤¤┬ã┬Á─Ë^─¯����ú¼│õÀÍ░l(f¿í)ô]╩ß╩¢╗¼Á└┤¼ÅSÁ─┤¼┼_(t¿ói)┐╔ý`╗¯▓╝Í├Á─â×(y¿¡u)³c(di¿ún)ú¼îì(sh¿¬)¼F(xi¿ñn)═¼òr(sh¿¬)ðÌÈýÂÓùl┤¼▓░�ú¼┐sÂ╠ðÌíóÈý┤¼Í▄ã┌ú¼╬Êéâ▓╔Ë├ç°(gu¿«)ÙH¤╚▀M(j¿¼n)Á─┤¼▓░¤┬╦«ð▒╝▄▄ç═¼▓¢ã¢║Ô┐ÏÍã¤Á¢y(t¿»ng)��ú¼Èô¤Á¢y(t¿»ng)ÛP(gu¿ín)µI╩Ã▀xË├║¤▀mÁ─╬╗Í├Öz£y(c¿¿)鸩ðã¸-┐╠Â╚ÿ╦(bi¿ío)│▀¥½┤_¿╬╗¤Á¢y(t¿»ng)�����íú
1.2 ─┐Ã░▓╔Ë├Á─¿╬╗À¢╩¢
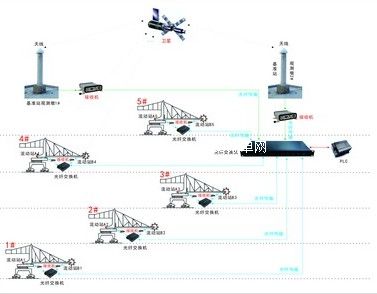
íííí─┐Ã░ð▒╝▄▄ç╬╗Í├Öz£y(c¿¿)▓╔Ë├Á─┤¾ÂÓ╩Ã╣ÔÙè¥Ä┤aã¸ÐbÍ├ú¿╣Ô┤a▒Pú®���íó╝ñ╣Ô╬╗Êã鸩ðã¸�����íógnss╬╗Í├Öz£y(c¿¿)ú¼¥▀¾w▒ݼF(xi¿ñn)╚þ¤┬ú║
1) ╣ÔÙè¥Ä┤aã¸ÐbÍ├����ú¼ı¹╠ÎÐbÍ├░▓ÐbÈ┌‗î(q¿▒)äË(d¿░ng)ÙèÖC(j¿®)Ã░▓┐Á─Ê╗éÇ(g¿¿)¢î┘Üñ¾wâ╚(n¿¿i)ú¼Ë╔▒P᯲X¦å┼c¥ÝôP(y¿óng)ÖC(j¿®)²Xùlçº║¤�����ú¼═¿▀^‗î(q¿▒)äË(d¿░ng)¦S‗î(q¿▒)äË(d¿░ng)¥Ä┤aã¸�íú▒P᯲X¦åÁ─êAÍ▄┼c¥ÝôP(y¿óng)ÖC(j¿®)‗î(q¿▒)äË(d¿░ng)ðí²X¦åÁ─êAÍ▄¤Ó═¼íú¥Ä┤aã¸Ë╔é¸äË(d¿░ng)²X¦åÎȤ┬°╔¤═¿▀^£p╦┘ÖC(j¿®)����íó┬ô(li¿ón)¦S╣Ø(ji¿ª)‗î(q¿▒)äË(d¿░ng)���ú¼îì(sh¿¬)¼F(xi¿ñn)¥ÝôP(y¿óng)ÖC(j¿®)Á─╬╗Í├Öz£y(c¿¿),Ë╔Ë┌õô¢z└K┤µÈ┌ö_Â╚ú¼╣╩ÚL(zh¿úng)¥ÓÙxÖz£y(c¿¿)ò■(hu¿¼)┤µÈ┌▒╚¦^┤¾ı`▓¯�ú¼¤Óîª(du¿¼)¿╬╗Á─ÖC(j¿®)ðÁ¢ËË|╣ñθÀ¢╩¢ú╗
2) ╝ñ╣Ô╬╗Êã鸩ðã¸È┌▓╗Øìⶡh(hu¿ón)¥│ò■(hu¿¼)╩º╚ÑθË├��ú¼▄ëÁ└│┴¢Áîº(d¿úo)Í┬▄ç¦vÎ▀ððÂÂäË(d¿░ng)ò■(hu¿¼)╩╣À┤╣Ô░Õ░ð╬╗▓╗£╩(zh¿│n)�ú¼ÊÓò■(hu¿¼)îº(d¿úo)Í┬╬╗Í├Öz£y(c¿¿)▓╗£╩(zh¿│n)ú¼Í┬├³Á─╩Ã╦«¤┬▓┐ÀÍÖz£y(c¿¿)▓╗Á¢�����ú╗
3) gnss╬╗Í├Öz£y(c¿¿)╩Ã└¹Ë├gps����ú¼▒▒ÂÀðl(w¿¿i)ðÿ╬╗ú¼╩äÓîª(du¿¼)¿╬╗����ú¼╩▄╠ýÜÔ¡h(hu¿ón)¥│Ë░Ýæ┤¾ú¼Í┬├³Á─╩Ã╦«¤┬▓┐ÀÍÖz£y(c¿¿)▓╗Á¢��íú
íííí▀@╚²ÀN鸩ðã¸È┌Öz£y(c¿¿)╬╗Í├òr(sh¿¬)ÂÓöÁ(sh¿┤)×ÚÖC(j¿®)ðÁ╩¢�íóý`├¶Â╚Á═íóë█├³Â╠íó╣╩ı¤┬╩©▀����íó┐╔┐┐ðÈÁ═ú¼▓┘θÀ▒µi���ú¼Â°ÃÊ┤µÈ┌┴´À┼¡h(hu¿ón)╣Ø(ji¿ª)(╝┤╩º┐Ïà^(q¿▒))�����ú¼Í┬╩╣░ÙÎÈäË(d¿░ng)▓┘θÙyÊÈ┐╔┐┐ÀÇ(w¿ºn)¿▀\(y¿┤n)ðð�íúË╔Ë┌ð▒╝▄▄ç╩æ^┤¾Á─ÈO(sh¿¿)éõ��ú¼ãõæTðȦ^┤¾���ú¼È┌åóäË(d¿░ng)║══úÍ╣òr(sh¿¬)Ê▓╩ÃË▓ðÈÁ─ú¼╦¨ÊÈÈ┌╣ñθ▀^│╠Íðò■(hu¿¼)«a(ch¿ún)╔·║▄┤¾Á─Î▓ô¶║═ıäË(d¿░ng)���ú¼ÈÙʶ╬█╚¥ç└(y¿ón)ÍÏ�����ú¼ç└(y¿ón)ÍÏË░Ýæãõ░▓╚½ðÈ║═ËðÛP(gu¿ín)┴Ò▓┐╝■Á─ë█├³�����ú¼ÊÎË┌ôpë─ÈO(sh¿¿)éõ��ú¼Ë╔┤╦ÈO(sh¿¿)éõ¥½┤_╬╗Í├┐ÏÍã´@Á├Ë╚×ÚÍÏʬ�íú
1.3 ▒¥¤Á¢y(t¿»ng)▓╔Ë├Á─¿╬╗╝╝ðg(sh¿┤)
íííí▒¥¤Á¢y(t¿»ng)▓╔Ë├È┌╩ß╩¢╗¼Á└╔¤╝ËÐb┐╠Â╚ÿ╦(bi¿ío)│▀¥½┤_¿╬╗¤Á¢y(t¿»ng)Á─Öz£y(c¿¿)╝╝ðg(sh¿┤)ú¼îì(sh¿¬)¼F(xi¿ñn)ð▒╝▄▄çÁ─╬╗Í├¥½┤_Öz£y(c¿¿)�����í����ú┐╠Â╚ÿ╦(bi¿ío)│▀Öz£y(c¿¿)Á¢Á─ð▒╝▄▄ç╬╗Í├¥½Â╚©▀ú¼ð┼╠û(h¿ño)ÀÇ(w¿ºn)¿┐╔┐┐����íúÈ┌▄ç¦vá¯æB(t¿ñi)┴╝║├Á─ÃÚør¤┬ú¼▓╔Ë├¤┬┤¼¤Á¢y(t¿»ng)╚½┬ô(li¿ón)ÖC(j¿®)ÎÈäË(d¿░ng)▀\(y¿┤n)ððÀ¢╩¢����ú¼╝┤Í╗ʬØMÎÒåó╩╝ùl╝■ú¼░┤¤┬ÎÈäË(d¿░ng)åóäË(d¿░ng)░┤Ôo��ú¼¤Á¢y(t¿»ng)îó╚½▓┐ÎÈäË(d¿░ng)▀\(y¿┤n)ðð�ú¼▓┘θ╚╦åTÍ╗ã▒O(ji¿ín)┐ÏθË├�ú¼«ö(d¿íng)░l(f¿í)╔·ÖC(j¿®)ðÁ╣╩ı¤╗‗ÊÔ═ÔÃÚøròr(sh¿¬)��ú¼░┤ÎÈäË(d¿░ng)═úÍ╣╗‗╝▒═ú░┤Ôo��ú¼¢Ô│²ÎÈäË(d¿░ng)│╠┐Ï▓┘θ�����íú
1.4 ▒¥¤Á¢y(t¿»ng)▓╔Ë├Á─═¼▓¢┐ÏÍãÀ¢╩¢
íííí─┐Ã░┤¾ÂÓöÁ(sh¿┤)┤¼ÅS▓╔Ë├╚╦╣ñË^£y(c¿¿)����ú¼├┐┼_(t¿ói)¥ÝôP(y¿óng)ÖC(j¿®)┼ÈÈO(sh¿¿)Ê╗▓┘θ╣ñú¼═¿▀^îª(du¿¼)ÍvÖC(j¿®)���íó┤Á┐┌╔┌����íóãýÄ├Á╚À¢╩¢üÝ£¤═¿ê╠(zh¿¬)ðð▓┘θ�����ú¼¤┬À┼ð▒╝▄▄ç�����íú▀@ÀN鸢y(t¿»ng)È¡╩╝Á─À¢À¿ä¦(sh¿¼)▒ÏÈý│╔▒O(ji¿ín)£y(c¿¿)Á─¥½Â╚▓╗ë‗║═ı{(di¿ño)┐Ï┤Ù╩®Á─£■║¾����ú¼ÃÊ╩▄╚╦×ÚÊ‗╦ÏË░Ýæ¦^┤¾ú¼îª(du¿¼)Ë┌┤¾ð═┤¼▓░¤┬╦«╚þ╣¹├┐éÇ(g¿¿)ð▒╝▄▄ç¤┬Êã╦┘Â╚▓╗═¼▓¢�ú¼Ë̓oÀ¿╝░òr(sh¿¬)ı{(di¿ño)ı¹ú¼║▄╚¦ÊÎîº(d¿úo)Í┬┤¼▓░¤┬╦«▀^│╠Íðð▒╝▄▄çÁ─├ô▄ë�����ú¼Ë░Ýæ┤¼▓░¤┬╦«Á─┘|(zh¿¼)┴┐���íúÊ‗┤╦����ú¼×Ú┴╦▒úÎC┤¾ð═┤¼▓░¤┬╦«Á─░▓╚½┐╔┐┐�����ú¼▒ÏÝÜîª(du¿¼)¤Á¢y(t¿»ng)▀M(j¿¼n)ðð╝┤òr(sh¿¬)▒O(ji¿ín)£y(c¿¿)║═ÎÈäË(d¿░ng)┐ÏÍã�����ú¼┤_▒ú┤¼▓░¤┬╦«òr(sh¿¬)ÊãäË(d¿░ng)Á─═¼▓¢ðÈ���ú¼Î¯┤¾¤ÌÂ╚Á─▒úÎC┤¼▓░Á─¤┬╦«░▓╚½���íú▒¥¤Á¢y(t¿»ng)▓╔Ë├Îâ¯lã¸║═plc│╠┐ϤÁ¢y(t¿»ng)���íú©¨ô■(j¿┤)┤¼¾wð╬á¯ú¼├┐┤╬╔²┤¼ú¿╗‗À┼┤¼ú®Î¸ÿI(y¿¿)┐╔ͩ¿╚╬ÊÔ┼_(t¿ói)ð▒╝▄▄ç┬ô(li¿ón)║¤▀\(y¿┤n)ðð�ú╗È┌╔²┤¼ú¿╗‗À┼┤¼ú®▀\(y¿┤n)ðð▀^│╠Íðú¼Ê¬Ã¾┤¼¾wÁ─╦«ã¢ã½ÊãÂ╚▓╗│¼│÷È╩ÈSÀÂç·����ú╗©¸ÀNÈO(sh¿¿)éõ░┤ʬþ▀M(j¿¼n)ðð═¼▓¢äË(d¿░ng)θú¼┐╔îì(sh¿¬)¼F(xi¿ñn)▀h(yu¿ún)│╠▓┘θ��íó╚½│╠╣ñθËøõø���íó▒O(ji¿ín)┐Ï����íó▀^¦d▒úÎo(h¿┤)��íóÎȵi����íó╗ѵiíó╗Ñ┐ÏåóäË(d¿░ng)���ú¼òr(sh¿¬)ÚgÐË▀t╝░äË(d¿░ng)θ│╠ð‗�ú¼▓ó┐╔▀M(j¿¼n)ðð▀h(yu¿ún)│╠���íó╩ÍäË(d¿░ng)║═ÎÈäË(d¿░ng)╣ª─▄ÃðôQ�����ú¼¥▀ËðÀ└Í╣ı`▓┘θ╣ª─▄��íúı¹éÇ(g¿¿)¤Á¢y(t¿»ng)¥▀ËðÎÈäË(d¿░ng)╗»│╠Â╚©▀�����ú¼═¼▓¢╝mã½┐ÏÍã����ú¼▓┘θ║å(ji¿ún)å╬�����íó┐╔┐┐���ú¼╣Ø(ji¿ª)╩íä┌äË(d¿░ng)┴ª╠ϳc(di¿ún)����íú
Á┌2ı┬ ┐╠Â╚ÿ╦(bi¿ío)│▀¥½┤_¿╬╗¤Á¢y(t¿»ng)
2.1 ┐╠Â╚ÿ╦(bi¿ío)│▀¤Á¢y(t¿»ng)║å(ji¿ún)å╬ıf├¸
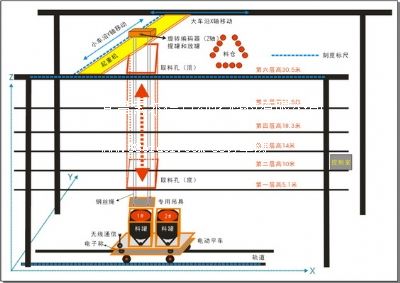
íííí┐╠Â╚ÿ╦(bi¿ío)│▀¥½┤_¿╬╗¤Á¢y(t¿»ng)░³└¿Ê╗┼_(t¿ói)ÁÏ├µÙèÜÔ╣±ú¿║¼┐╠Â╚ÀÍ╬÷âxÁ╚ú®íóÊ╗┼_(t¿ói)▄ç¦dÙèÜÔ╣±ú¿║¼┐╠Â╚╔·│╔âxÁ╚ú®��íó┐╠Â╚ÿ╦(bi¿ío)│▀ÊÈ╝░Ë╬│▀Í©ßÿÁ╚�����íúãõÍð┐╠Â╚ÿ╦(bi¿ío)│▀╩ÃË╔▒Ôã¢á¯Á─pvc║¤│╔▓─┘|(zh¿¼)═ÔÜñ▓─┴¤║═â╚(n¿¿i)▓┐░┤ıı©±└Î┤aÊÄ(gu¿®)┬╔¥ÄÍãÁ─ð¥¥Çÿï(g¿░u)│╔���ú¼¯É╦ãÊ╗░ÐËð┐╠Â╚Á─ÿ╦(bi¿ío)│▀��ú¼Ê╗░Ò░▓ÐbÈ┌ÐÏð▒╝▄▄ç▀\(y¿┤n)ðð▄ëÁ└å╬é╚(c¿¿)▀à�ú¼╗‗ı▀ÐÏ▀\(y¿┤n)ðð▄ë█EõüÈO(sh¿¿)È┌ÁÏ├µ╔¤��ú¼ÊÓ╗‗░▓ÐbÈ┌▄ëÁ└┼ÈÁ─û┼Ö┌┴óͨ╔¤¥¨┐╔����ú¼ðÞʬÖz£y(c¿¿)ÂÓÚL(zh¿úng)Á─╬╗Êã¥═õüÈO(sh¿¿)ÂÓÚL(zh¿úng)Á─┐╠Â╚ÿ╦(bi¿ío)│▀ú╗Ë╬│▀Í©ßÿ░▓ÐbÈ┌ð▒╝▄▄ç╔¤����ú¼Ë├Ë┌ÎR(sh¿¬)äe▒¥ð▒╝▄▄ç╦¨È┌Á─╬╗Í├����íúË╬│▀Í©ßÿ¤Óîª(du¿¼)┐╠Â╚ÿ╦(bi¿ío)│▀ã¢ððÀâËË|ÊãäË(d¿░ng)���ú¼Ë╬│▀Í©ßÿÍ©¤‗Á─┐╠Â╚╝┤╩ëö(d¿íng)Ã░╬╗Í├ÍÁú¼┐╔ÊÈÈ┌▄ç╔¤╗‗ÁÏ╔¤Á├Á¢╬╗Êã┴┐�����ú¼ƒoðÞ│§╩╝àó┐╝³c(di¿ún)����ú¼Â¿╬╗¥½Â╚5║┴├Îú¼ÀÍ▒µ┬╩2║┴├Î�ú╗┐╔ÊÈöÓ└m(x¿┤)╗‗▀B└m(x¿┤)Öz£y(c¿¿)ú¼Ë╚ãõ▀mË├Ë┌▄ëÁ└▓╗ã¢ı¹Á─┤¾▄ç╗‗¡h(hu¿ón)ð╬▀\(y¿┤n)äË(d¿░ng)ÖC(j¿®)ðÁ╬╗ÊãÖz£y(c¿¿)���íúÀ└╦«�����íóÀ└Ë═�����íóÀ└ëm����íó─═╦ßëAú¼▀mË├Ë┌Ê▒¢��íóÁV╔¢��íó╦«└¹�íó©█┐┌┤a¯^ÂÐê÷(ch¿úng)íóé}(c¿íng)âª(ch¿│)����íó╗»╣ñÁ╚ùl╝■▒╚¦^É║┴ËÁ─¡h(hu¿ón)¥│íú
2.2 ┐╠Â╚ÿ╦(bi¿ío)│▀¤Á¢y(t¿»ng)È¡└Ý
íííí┐╠Â╚ÿ╦(bi¿ío)│▀¥½┤_¿╬╗¤Á¢y(t¿»ng)▓╔Ë├Ùè┤┼©ðæ¬(y¿®ng)È¡└ÝüÝÖz£y(c¿¿)ÊãäË(d¿░ng)ÈO(sh¿¿)éõÁ─╬╗Êã┴┐���ú¼«ö(d¿íng)Ë╬│▀Í©ßÿ¥Ç╚ªÍð═¿╚Ù¢╗ÎâÙè┴¸òr(sh¿¬)���ú¼È┌Ë╬│▀Í©ßÿ©¢¢³ò■(hu¿¼)«a(ch¿ún)╔·¢╗Îâ┤┼ê÷(ch¿úng)í���ú┐╠Â╚ÿ╦(bi¿ío)│▀¢³╦ã╠ÄÈ┌Ê╗éÇ(g¿¿)¢╗ÎâÁ─�����íó¥¨ä‗ÀÍ▓╝Á─┤┼ê÷(ch¿úng)Íð,├┐îª(du¿¼)┐╠Â╚ÿ╦(bi¿ío)│▀ð¥¥Çò■(hu¿¼)«a(ch¿ún)╔·©ðæ¬(y¿®ng)ÙèäË(d¿░ng)ä¦(sh¿¼)��í�����ú┐╠Â╚╔·│╔âxð┼╠û(h¿ño)═¿▀^Ùè┤┼±¯║¤À¢╩¢é¸╦═Á¢┐╠Â╚ÿ╦(bi¿ío)│▀Á─©ðæ¬(y¿®ng)¡h(hu¿ón)¥Ç╔¤��í�ú┐╠Â╚ÀÍ╬÷âxîª(du¿¼)¢Ë╩ıÁ¢Á─ð┼╠û(h¿ño)▀M(j¿¼n)ðð¤Ó╬╗▒╚¦^�íú¢╗▓µ¥ÇÁ─ð┼╠û(h¿ño)¤Ó╬╗┼cã¢ðð¥ÇÁ─ð┼╠û(h¿ño)¤Ó╬╗¤Ó═¼ú¼ÁÏÍÀ×Úí░0í▒�����ú╗¢╗▓µ¥ÇÁ─ð┼╠û(h¿ño)¤Ó╬╗┼cã¢ðð¥ÇÁ─ð┼╠û(h¿ño)¤Ó╬╗¤ÓÀ┤�ú¼ÁÏÍÀ×Úí░1í▒ú¼▀@ÿË©ðæ¬(y¿®ng)Á─ÁÏÍÀð┼¤ó╩é±└Î┤a┼┼┴ð���ú¼Ë╔┤╦┤_¿Ë╬│▀Í©ßÿÈ┌┐╠Â╚ÿ╦(bi¿ío)│▀ÚL(zh¿úng)Â╚À¢¤‗╔¤Á─╬╗Í├��íú
2.3 ┐╠Â╚ÿ╦(bi¿ío)│▀╝╝ðg(sh¿┤)Í©ÿ╦(bi¿ío)
* ð▒╝▄▄çÁÏÍÀ£y(c¿¿)┴┐¥½Â╚ú║í▄5mm�ú¼ÀÍ▒µ┬╩ú║2║┴├Îú¼£y(c¿¿)┴┐ÀÂç·ú║╚╬ÊÔ¿Íã��ú╗
* ╣ñθ¡h(hu¿ón)¥│£ÏÂ╚ú║¤Á¢y(t¿»ng)╣ñθ£ÏÂ╚ú║-20íµí¬+70íµ�����ú¼
íííííííííí┐╠Â╚ÿ╦(bi¿ío)│▀╣ñθ£ÏÂ╚ú║▓╗╝ËÀ└Îo(h¿┤)╠Îú║-40íµí¬+85íµ����ú¼
íííííííííííííííííí╝ËÀ└╗╠Îú║-40íµí¬600íµú¼©▀£Ïòr(sh¿¬)─═ƒßòr(sh¿¬)Úg╝s80├Ù��ú╗
* ÀâËË|Úg¤Âú║150mmí└50mm(©¨ô■(j¿┤)ðÞʬ┐╔▀_(d¿ó)500║┴├Î)�����ú¼Î¾ËÊã½ö[╚¦▓¯ú║í└50mm�ú╗
* ÍÏ┴┐ú║┐╠Â╚ÿ╦(bi¿ío)│▀ÍÏ┴┐ú║1.5kg/mú¼═Ôð╬│▀┤þú║100mmí┴10mmí┴ÚL(zh¿úng)Â╚��ú╗
ííííííííË╬│▀Í©ßÿÍÏ┴┐ú║í▄2.5kg�ú¼═Ôð╬│▀┤þú║400mmí┴400mmí┴30mmú¿╠Ï╩Ô┐╔¿Íãú®ú╗
* ═¿ð┼ı`┤a┬╩ú║ú╝10-7���ú╗
* ╦óð┬╦┘Â╚ú║20hz����ú╗
* ▀mæ¬(y¿®ng)╦┘Â╚ú║í▄350m/minú╗
* ÿ╦(bi¿ío)£╩(zh¿│n)ð┼╠û(h¿ño)¦ö│÷ú║rs232/rs485���ú¼┐╔öU(ku¿░)ı╣ãõ╦³ð┼╠û(h¿ño)�����ú╗
* ð┼╠û(h¿ño)鸦ö¥ÓÙxú║í▄1200├Îú¿485ð┼╠û(h¿ño)¦ö│÷ú®�ú╗
* ┐╠Â╚ÿ╦(bi¿ío)│▀║═Ë╬│▀Í©ßÿÀ└Îo(h¿┤)Á╚╝ë(j¿¬)ú║ãı═¿ip67���ú¼Î¯©▀ip69ú¿╦«¤┬╣ñθú®ú╗
* ¦ö╚ÙÙèÈ┤ú║220vací└10úÑ��ú╗
* ║─Ùèú║ÁÏ├µÙèÜÔ╣±<100w▄ç¦dÙèÜÔ╣±<100w�����íú
2.4 ┐╠Â╚ÿ╦(bi¿ío)│▀╣ª─▄╠ϳc(di¿ún)
íííí¤Á¢y(t¿»ng)ÍðÁ─┐╠Â╚╔·│╔âxú¿╝µ║»öÁ(sh¿┤)ð┼╠û(h¿ño)░l(f¿í)╔·ú®░┤Ê╗¿Á─Í▄ã┌░l(f¿í)│÷ÁÏÍÀ¦d▓¿ð┼╠û(h¿ño)���ú¼¢ø(j¿®ng)Ë╬│▀Í©ßÿ░l(f¿í)╔õÍ┴┐╠Â╚ÿ╦(bi¿ío)│▀��ú¼ÁÏ├µı¥Á─┐╠Â╚ÀÍ╬÷âx¢Ë╩ıÁ¢ð┼╠û(h¿ño)║¾�ú¼¢Ô┤a▀ÇÈ¡│÷ð▒╝▄▄ç╦¨╠Ä┐╠Â╚ÿ╦(bi¿ío)│▀╠ÄÁ─¢^îª(du¿¼)ÁÏÍÀú¼¢ø(j¿®ng)┐ÏÍãã¸╠Ä└Ý║¾Ë╔rs232╗‗ı▀rs485¦ö│÷����íú
* ƒo─ÑôpÁ─ÀâËË|╩¢╬╗Í├Öz£y(c¿¿)ú¼╩╣Ë├ë█├³ÚL(zh¿úng)����ú╗
* ┐╔ÊÈöÓ└m(x¿┤)╗‗▀B└m(x¿┤)Öz£y(c¿¿)ú¼£y(c¿¿)¥ÓÚL(zh¿úng)▀_(d¿ó)2╣½└´���ú¼╬╗ÊãÖz£y(c¿¿)ÚL(zh¿úng)Â╚┐╔ÊÈ©¨ô■(j¿┤)ðÞʬ¿Íã���ú╗
* ─═╬█╚¥─▄┴ª│¼Åè(qi¿óng)ú¼┐╔Ë├È┌╦«¤┬��íóÀ└ı¶ã¹���íó─═╦ßëA�ú╗
* ░▓Ðb║å(ji¿ún)å╬©³ôQÀ¢▒Òú¿ƒoðÞ©─Îâ¼F(xi¿ñn)ê÷(ch¿úng)¡h(hu¿ón)¥│ú®�����ú¼├Ô¥SÎo(h¿┤)�ú╗
* ©▀ÀÇ(w¿ºn)¿ðÈ��íó©▀┐╔┐┐ðÈ����íóÂÓÀNð┼╠û(h¿ño)¦ö│÷À¢╩¢▀xô±��ú╗
* ¥▀ËðÀ┤¤‗ÿOðÈ▒úÎo(h¿┤)╣ª─▄���íóÀ└└Îô¶���íóÀ└╔õ¯l©╔ö_íóÀ└ýoÙè��ú╗
* ƒoðÞàó┐╝³c(di¿ún)Á─╬╗Êã┴┐¢^îª(du¿¼)ð═¦ö│÷����ú¼▓╗┼┬Á¶Ùè����ú╗
* ╬╗Í├Á─╚íÿËòr(sh¿¬)Úg║═£y(c¿¿)┴┐ÚL(zh¿úng)Â╚ø]ËðÛP(gu¿ín)¤Áú╗
* ┐╔ÊÈË├È┌¡h(hu¿ón)ð╬▀\(y¿┤n)äË(d¿░ng)ÖC(j¿®)ðÁ╬╗Í├Öz£y(c¿¿)����íú
* ┐╠Â╚ÿ╦(bi¿ío)│▀┐╔ÊÈ┬±È┌╦«─ÓÁÏ├µâ╚(n¿¿i)�����ú¼À¢▒Ò░▓Ðb║═À└Îo(h¿┤)�����ú¼▓╗Ë░ÝæθÿI(y¿¿)¡h(hu¿ón)¥│����íú
2.5 ┐╠Â╚ÿ╦(bi¿ío)│▀å╬╠ÎÈO(sh¿¿)éõ¢Y(ji¿ª)ÿï(g¿░u)êDú¿Ê╗¥SÖz£y(c¿¿)ú®
1) ▄ç¦dÎˤÁ¢y(t¿»ng)ú║Ë╔Ë╬│▀Í©ßÿ����íó▄ç¦dÙèÜÔ╣±ú¿â╚(n¿¿i)║¼┐╠Â╚╔·│╔âxíóÚ_ÛP(gu¿ín)ÙèÈ┤Á╚ú®��íú
2) ÁÏ├µÎˤÁ¢y(t¿»ng)ú║Ë╔ÁÏ├µÙèÜÔ╣±¢M│╔ú¿â╚(n¿¿i)║¼┐╠Â╚ÀÍ╬÷âx�����íóÚ_ÛP(gu¿ín)ÙèÈ┤�íó¥W(w¿úng)ÛP(gu¿ín)íóÿ╦(bi¿ío)│▀ʲ¥ÇÌD(zhu¿ún)ôQã¸Á╚ú®���íú
3) ┐╠Â╚ÿ╦(bi¿ío)│▀ÎˤÁ¢y(t¿»ng)ú║Ë╔îúË├┐╠Â╚ÿ╦(bi¿ío)│▀�����íócn¤õ��íóen¤õ���íóãı═¿Ùè└|ÊÈ╝░©¸ÀNË├Ë┌┐╠Â╚ÿ╦(bi¿ío)│▀░▓Ðb���íó╣╠¿íóÀ└Îo(h¿┤)ÖC(j¿®)ÿï(g¿░u)¢M│╔���íú
êD╩¥2ú║Ê╗¥SÖz£y(c¿¿)¤Á¢y(t¿»ng)¢Y(ji¿ª)ÿï(g¿░u)╩¥ÊÔêD
Á┌3ı┬ Ùè┐Ï═¼▓¢ã¢║Ô¤Á¢y(t¿»ng)
íííí¥ÝôP(y¿óng)ÖC(j¿®)ÙèÖC(j¿®)┐╔▓╔Ë├╚²¤Ó«É▓¢ÙèäË(d¿░ng)ÖC(j¿®)�����íú¥ÝôP(y¿óng)ÖC(j¿®)┐ÏÍã¤Á¢y(t¿»ng)▓╔Ë├¢╗┴¸╚½Îâ¯lı{(di¿ño)╦┘��ú¼¤Á¢y(t¿»ng)─▄È┌È╩ÈSί┤¾á┐ʲ┴ªÀÂç·â╚(n¿¿i)�ú¼îª(du¿¼)ð▒╝▄▄ç▀M(j¿¼n)ððÎÈäË(d¿░ng)╗‗╩ÍäË(d¿░ng)Á─═¼▓¢ı{(di¿ño)ı¹����ú¼ÊÈ┤_▒úð▒╝▄▄ç─▄ã¢ÀÇ(w¿ºn)Á─╔¤�����íó¤┬ã¢ððÊãäË(d¿░ng)íú12┼_(t¿ói)¥ÝôP(y¿óng)ÖC(j¿®)┐╔ÊÈ┬ô(li¿ón)äË(d¿░ng)╗‗å╬┼_(t¿ói)╣ñθ����ú¼Ê▓┐╔╚╬ÊÔ▀x¿ãõÍðÁ─ÄÎ┼_(t¿ói)ÙèÖC(j¿®)▀M(j¿¼n)ðð┬ô(li¿ón)äË(d¿░ng)╣ñθíú
3.1 ╔¤└¡¤┬À┼┐ÏÍã
ú¿1ú® ¥ÝôP(y¿óng)ÖC(j¿®)ÿï(g¿░u)Ú]¡h(hu¿ón)┐ÏÍãÁ─╦┘Â╚À┤ü▓╔Ë├┐╠Â╚ÿ╦(bi¿ío)│▀¥½┤_¿╬╗¤Á¢y(t¿»ng)�íúplc┼cÎâ¯lã¸═¿▀^┐é¥Çîì(sh¿¬)¼F(xi¿ñn)═¿Ëì┐ÏÍãú¼plcîì(sh¿¬)òr(sh¿¬)Îx╚íÎâ¯lã¸Á─öÁ(sh¿┤)ô■(j¿┤)����ú¼▓ó═¿▀^¦ö╚Ù¢oplcÁ─͸┴¯┐ÏÍãã¸ð┼╠û(h¿ño)┐ÏÍãÎâ¯lã¸Á─¯l┬╩╝░ÙèäË(d¿░ng)ÖC(j¿®)Á─ÌD(zhu¿ún)╦┘íúÈO(sh¿¿)éõåóäË(d¿░ng)òr(sh¿¬)���ú¼▒úÎC▒ÏÝÜÁ─ãäË(d¿░ng)ÌD(zhu¿ún)¥ÏËÍ▓╗ò■(hu¿¼)îª(du¿¼)Ùè¥W(w¿úng)▀M(j¿¼n)ðð┤¾Á─ø_ô¶����ú¼ãäË(d¿░ng)Ùè┴¸æ¬(y¿®ng)┐ÏÍãÈ┌┐╔ÊÈ¢Ë╩▄Á─öÁ(sh¿┤)ÍÁâ╚(n¿¿i)�����íú
ú¿2ú® Îâ¯lã¸Ã░ÈO(sh¿¿)Í├¥Ç┬ÀÙè┐╣ã¸��íú
ú¿3ú® ¤Á¢y(t¿»ng)ͺ│ÍÙèÜÔ║═ÖC(j¿®)ðÁÍãäË(d¿░ng)ú¼È┌═úÖC(j¿®)òr(sh¿¬)▓╔Ë├ÙèÜÔÍãäË(d¿░ng)À¢╩¢��ú¼╠ß╣®┐╔┐ÏÁ─║═ã¢╗¼Á─ÍãäË(d¿░ng)ðÈ─▄��ú¼È┌ÙèÖC(j¿®)¢ÁÁ¢┴Ò╦┘Í«║¾���ú¼┴ó╝┤╩®╝ËÖC(j¿®)ðÁÍãäË(d¿░ng)�����ú¼È┌╚╬║╬╩ºÙèÃÚør¤┬���ú¼¥¨æ¬(y¿®ng)┴ó╝┤╩®╝ËÖC(j¿®)ðÁÍãäË(d¿░ng)íú¥ÝôP(y¿óng)ÖC(j¿®)ÿï(g¿░u)ÖC(j¿®)ðÁÍãäË(d¿░ng)▓╔Ë├ÙèÊ║═ãäË(d¿░ng)ÍãäË(d¿░ng)ã¸�����ú¼Îâ¯l㸥▀Ëð═Ûı¹Á─▒ºÚl▀ë¦ï╣ª─▄��ú¼║¤└Ý┐ÏÍãäx▄çÁ─Ú_Ú]òr(sh¿¬)Úg��ú¼£p╔┘▒ºÚlÚ_Ú]òr(sh¿¬)Á─ı±äË(d¿░ng)╝░─Ñôp��ú¼╩╣ã═ú©³ã¢ÀÇ(w¿ºn)��íú
ú¿4ú® ð▒╝▄▄ç¤┬¢Á▀^│╠Íðú¼Ïô(f¿┤)¦dÁ─╬╗─▄îó═¿▀^ÍãäË(d¿░ng)ÙèÎÞ░l(f¿í)ƒßÁ─ð╬╩¢¤¹║─Á¶��ú¼Ê‗┤╦├┐╠ÎÎâ¯l╣±Â╝┼õËð▀m«ö(d¿íng)╣ª┬╩Á─ÍãäË(d¿░ng)ÙèÎÞ�íú
ú¿5ú® È┌├┐┼_(t¿ói)¥ÝôP(y¿óng)ÖC(j¿®)Á─▀m«ö(d¿íng)╬╗Í├░▓ÐbÊ╗éÇ(g¿¿)ð²ÌD(zhu¿ún)╩¢¤Ì╬╗Ú_ÛP(gu¿ín)�íú«ö(d¿íng)ð▒╝▄▄ç╔¤╔²Á¢¢Ë¢³╔¤¤Ì╬╗Í├òr(sh¿¬)ú¼Èô¤Ì╬╗Ú_ÛP(gu¿ín)░l(f¿í)│÷Í©┴¯���ú¼¢ÁÁ═ð▒╝▄▄çÁ─▀\(y¿┤n)ðð╦┘Â╚ú¿ƒoıôÍ©┴¯┐ÏÍãã¸È┌║╬Ön╬╗ú®����ú¼«ö(d¿íng)ð▒╝▄▄çÁ¢▀_(d¿ó)╔¤¤Ì╬╗Í├òr(sh¿¬)����ú¼¤Á¢y(t¿»ng)░l(f¿í)│÷═úÍ╣ð▒╝▄▄ç▀\(y¿┤n)ððÁ─Í©┴¯ú¼ð▒╝▄▄ç¤┬¢Áòr(sh¿¬)═¼ÿËÈO(sh¿¿)Í├¢Á╦┘║══úÍ╣Â■³c(di¿ún)╬╗Í├Ú_ÛP(gu¿ín)����íúÈ┌©¸ùl▄ëÁ└Á─ί╔¤├µ┴Ý░▓ÐbÊ╗¤Ì╬╗Ú_ÛP(gu¿ín)ú¼Î¸×Úί║¾Á─¢KÂ╦▒úÎo(h¿┤)��íú═¼òr(sh¿¬)¥ÝôP(y¿óng)ÖC(j¿®)æ¬(y¿®ng)ÈO(sh¿¿)Í├Ëð▀^¦d▒úÎo(h¿┤)ÐbÍ├�����ú¼«ö(d¿íng)▒O(ji¿ín)£y(c¿¿)Á¢õô¢z└K└¡┴ª│¼▀^¯~¿Ïô(f¿┤)¦dòr(sh¿¬)æ¬(y¿®ng)ÎÈäË(d¿░ng)═ú▄çíú
ú¿6ú® ¥ÝôP(y¿óng)ÖC(j¿®)ÿï(g¿░u)Á─ÙèÜÔ▒úÎo(h¿┤)ËðÂ╠┬À╝░▀^Ùè┴¸▒úÎo(h¿┤)���íó▀^¦d▒úÎo(h¿┤)���íó╩ºë║╝░┴Ò╬╗▒úÎo(h¿┤)ú¼«ö(d¿íng)Îâ¯lã¸│÷¼F(xi¿ñn)╣╩ı¤ð┼╠û(h¿ño)òr(sh¿¬)���ú¼▒ÏÝÜ═¿▀^▓┘θ┼_(t¿ói)Á─Å═(f¿┤)╬╗░┤Ôo▀M(j¿¼n)ððÅ═(f¿┤)╬╗����íú
3.2 ═¼▓¢╬╗Í├┐ÏÍã
ú¿1ú® È┌ÂÓ┼_(t¿ói)¥ÝôP(y¿óng)ÖC(j¿®)═¼òr(sh¿¬)θÿI(y¿¿)ÃÚør¤┬��ú¼Ë╔Ë┌ÂÓÀNÈ¡Ê‗┐╔─▄┤µÈ┌¥ÝôP(y¿óng)ÖC(j¿®)▓╗═¼▓¢Â°îº(d¿úo)Í┬¤┬╦«┤¼▓░░l(f¿í)╔·ã½ð▒���ú¼îóË░Ýæ┤¼▓░¤┬╦«▀^│╠Á─░▓╚½�����í�ú┐ÏÍã¤Á¢y(t¿»ng)¥▀Ëð▒O(ji¿ín)Êò©¸ð▒╝▄▄çÁ─╬╗Í├Á─ÈO(sh¿¿)éõ�ú¼¢Y(ji¿ª)║¤Îâ¯lı{(di¿ño)╦┘║═plc┐ÏÍãíúîì(sh¿¬)¼F(xi¿ñn)┤¼▓░È┌¤┬╦«▀^│╠Íð┤¼▓░¶▒¦S¥Ç┼c╗¼Á└┴Ò¦S¥ÇÍ«ÚgÁ─▀B└m(x¿┤)¢^îª(du¿¼)╬╗Í├ã½ð▒Öz£y(c¿¿)║═┐ÏÍã�íúÂÓ┼_(t¿ói)ÙèÖC(j¿®)┬ô(li¿ón)äË(d¿░ng)òr(sh¿¬)͸¢o¿×Ú╦┘Â╚¢o¿�ú¼╝┤╦┘Â╚¢o¿┴ª¥Ï¤ÌÍãÁ─À¢╩¢���íúã╔²ð┼╠û(h¿ño)║═╦┘Â╚Ë╔═¼Ê╗Ú_ÛP(gu¿ín)¢o¿����ú¼©¸éÇ(g¿¿)╠ß╔²ÖC(j¿®)ÿï(g¿░u)═¼òr(sh¿¬)╠ß╔²���íúplc═¿▀^┐é¥Çîì(sh¿¬)òr(sh¿¬)▒O(ji¿ín)Êò©¸éÇ(g¿¿)Îâ¯lã¸Á─Ùè┴¸íóÙèë║��íó┴ª¥ÏÁ╚öÁ(sh¿┤)ô■(j¿┤)�����íú
ú¿2ú® îª(du¿¼)Ë┌┤¼▓░╔¤���íó¤┬╦«òr(sh¿¬)���ú¼╦¨Ë├ð▒╝▄▄ç═¼▓¢┐ÏÍã¤Á¢y(t¿»ng)ί¢Kʬþ▀_(d¿ó)Á¢ãõÍð╚╬ÊÔâ╔┼_(t¿ói)ð▒╝▄▄ç╦¨Äº╬╗Í├鸩ð¤Á¢y(t¿»ng)È┌ð▒ã┬Á└╔¤Á─ðð│╠╬╗Í├ÀÂç·â╚(n¿¿i)╚½│╠îì(sh¿¬)¼F(xi¿ñn)═¼▓¢┐ÏÍã║¾Á─¤Óîª(du¿¼)╬╗Êã▓¯Î¯┤¾▓╗│¼▀^350mmíú╚╬ÊÔ¤ÓÓÅâ╔┼_(t¿ói)ð▒╝▄▄ç¤Óîª(du¿¼)╬╗Êã▓¯Î¯┤¾▓╗│¼▀^140mm���íú«ö(d¿íng)¤Óîª(du¿¼)╬╗ÊãðíË┌100mm═¼▓¢┐ÏÍã¤Á¢y(t¿»ng)▓╗░l(f¿í)│÷┐ÏÍãÍ©┴¯��ú¼«ö(d¿íng)¤Óîª(du¿¼)╬╗Êã┤¾Ë┌140mmðíË┌250mmòr(sh¿¬)���ú¼═¼▓¢┐ÏÍã¤Á¢y(t¿»ng)░l(f¿í)╦═Í©┴¯Á¢¤Óæ¬(y¿®ng)Îâ¯lã¸����ú¼ı{(di¿ño)ı¹©¸ÙèÖC(j¿®)Á─╦┘Â╚�����ú¼îì(sh¿¬)¼F(xi¿ñn)ÎÈäË(d¿░ng)═¼▓¢����íó¤Ó▓¯ÍÁ┤¾Ë┌250mmòr(sh¿¬)═¼▓¢┐ÏÍã│╠ð‗░l(f¿í)╦═Í©┴¯Á¢¤Óæ¬(y¿®ng)Îâ¯lã¸ú¼ı{(di¿ño)ı¹©¸ÙèÖC(j¿®)╦┘Â╚═¼òr(sh¿¬)ı¹éÇ(g¿¿)¤Á¢y(t¿»ng)Á─╦┘Â╚¤┬¢ÁÁ¢▒╚¦^Á═Á─╦┘Â╚�ú¼ÊÈÀ└Í╣¤Ó▓¯ÍÁ▀M(j¿¼n)Ê╗▓¢öU(ku¿░)┤¾ú¼▓ó░l(f¿í)│÷¯A(y¿┤)ê¾(b¿ño)¥»ð┼╠û(h¿ño)�íú«ö(d¿íng)¤Á¢y(t¿»ng)ı{(di¿ño)ı¹Á¢¤Óîª(du¿¼)╬╗ÊãðíË┌100mmòr(sh¿¬)ú¼¤Á¢y(t¿»ng)═úÍ╣ı{(di¿ño)ı¹��íú«ö(d¿íng)¤Ó▓¯ÍÁ┤¾Ë┌500mmòr(sh¿¬)���ú¼¤Á¢y(t¿»ng)ÎÈäË(d¿░ng)═ú▄ç▓óê¾(b¿ño)¥»����íú▀\(y¿┤n)ðð▀^│╠Íð═¼òr(sh¿¬)îª(du¿¼)┴ª¥Ï▀M(j¿¼n)ðð▒O(ji¿ín)Êòú¼«ö(d¿íng)─│┼_(t¿ói)ÙèÖC(j¿®)Á─┴ª¥Ï┤¾Ë┌╚╦×ÚÈO(sh¿¿)¿Á─¤ÌÍã┴ª¥Ïòr(sh¿¬)���ú¼┐ÏÍã¤Á¢y(t¿»ng)îª(du¿¼)¤Óæ¬(y¿®ng)Á─ÙèÖC(j¿®)░l(f¿í)│÷Í©┴¯ı{(di¿ño)ı¹ãõ┴ª¥Ï╗‗╦┘Â╚����íú«ö(d¿íng)ÙèÖC(j¿®)┴ª¥Ï┤¾Ë┌╬úÙU(xi¿ún)┴ª¥Ï╗‗┴ª¥Ï▀^ðí����ú¼┐ÏÍã¤Á¢y(t¿»ng)ê¾(b¿ño)¥»▓ó═úÖC(j¿®)����ú¼┤╦òr(sh¿¬)ðÞ▓┘θ╚╦åT©¨ô■(j¿┤)Ë|├■ã┴╔¤Á─╠ß╩¥▀M(j¿¼n)ðð╩ÍäË(d¿░ng)ı{(di¿ño)ı¹íú╣╩ı¤┼┼│²║¾¤Á¢y(t¿»ng)┐╔ÎÈäË(d¿░ng)Å═(f¿┤)╬╗��íúÊÈ╔¤ÈO(sh¿¿)¿Á─ð▒╝▄▄ç▓╗═¼▓¢àóöÁ(sh¿┤)öÁ(sh¿┤)ÍÁ║═┴ª¥ÏàóöÁ(sh¿┤)öÁ(sh¿┤)ÍÁ¥¨┐╔░┤ıı¢±║¾ı{(di¿ño)Èç║═ÈçË├ÃÚør╚╬ÊÔı{(di¿ño)ı¹�����íú
3.3 ╣ñ┐ÏÖC(j¿®)�����íóplc┐ÏÍã╝░╣╩ı¤▒O(ji¿ín)┐ϤÁ¢y(t¿»ng)
ú¿1ú® ┐ÏÍã¤Á¢y(t¿»ng)▓╔Ë├╩ÍäË(d¿░ng)���íó┬ô(li¿ón)äË(d¿░ng)�íóÎÈäË(d¿░ng)Á╚┐ÏÍãÀ¢╩¢ú¼ÎÈäË(d¿░ng)┐ÏÍãÀ¢╩¢▓╔Ë├╣ñ┐ÏÖC(j¿®)+Ë|├■ã┴Â■╝ë(j¿¬)┐ÏÍã▓┘θ¤Á¢y(t¿»ng)����ú¼▓ó¯A(y¿┤)┴¶▀h(yu¿ún)│╠▓┘θ¢Ë┐┌íú
ú¿2ú® Ë╔╣ñ┐ÏÖC(j¿®)���íóplc��íóÎâ¯lã¸�����íó═¼▓¢┐ÏÍãÈO(sh¿¿)éõ�íóÏô(f¿┤)║╔▒úÎo(h¿┤)ÐbÍ├����íó©¸Í¸┴¯┐ÏÍãÈO(sh¿¿)éõÁ╚¢M│╔plc┐ÏÍãÁ─╚½Îâ¯lı{(di¿ño)╦┘¤Á¢y(t¿»ng)íú͸┴¯┐ÏÍãã¸╣ª─▄▀xô±Ú_ÛP(gu¿ín)�����ú¼Îâ¯lã¸â╚(n¿¿i)©¸Ùèã¸àóöÁ(sh¿┤)íó©¸▒úÎo(h¿┤)¤Á¢y(t¿»ng)Á─ËðÛP(gu¿ín)öÁ(sh¿┤)ô■(j¿┤)���í󩸤Ì╬╗Ú_ÛP(gu¿ín)Á╚ð┼╠û(h¿ño)Í▒╦═plc����ú¼plc©¨ô■(j¿┤)¯A(y¿┤)¥Ä│╠ð‗�����ú¼îó©¸ÀNÍ©┴¯╦═©¸ê╠(zh¿¬)ððÖC(j¿®)ÿï(g¿░u)╝░ı{(di¿ño)╦┘ã¸�ú¼øQ¿©¸▀\(y¿┤n)ððÖC(j¿®)ÿï(g¿░u)Á─╦┘Â╚┤¾ðíú¼▓óîª(du¿¼)ãõ▀M(j¿¼n)ðð┐ÏÍãı{(di¿ño)╣Ø(ji¿ª)��íú©¸ð┼¤óÁ─é¸▀fÂ╝Ë╔¼F(xi¿ñn)ê÷(ch¿úng)┐é¥Ç═Û│╔�íú
ú¿3ú® ╣╩ı¤▒O(ji¿ín)┐ϤÁ¢y(t¿»ng)Ë╔plc║═▓┘θ╩Êâ╚(n¿¿i)Á─Ë|├■ã┴¢M│╔ËÐ║├Á─╚╦ÖC(j¿®)¢þ├µ�����ú¼═¿▀^¼F(xi¿ñn)ê÷(ch¿úng)┐é¥ÇÍ▒¢ËÅ─plcÍðÎx╚íöÁ(sh¿┤)ô■(j¿┤)���ú¼îì(sh¿¬)¼F(xi¿ñn)ð┼¤ó╣▓¤Ý����ú¼Ë├êDð╬║═╬─ÎÍîì(sh¿¬)òr(sh¿¬)´@╩¥╣╩ı¤Á─╬╗Í├╝░║å(ji¿ún)å╬Á─╠Ä└ÝÀ¢À¿���ú¼▒O(ji¿ín)┐Ï©¸Í¸Ê¬Ùèã¸È¬╝■▀\(y¿┤n)ðð╗‗═úÍ╣Á─á¯æB(t¿ñi)���ú¼Îâ¯lã¸▀\(y¿┤n)ððàóöÁ(sh¿┤)�����íó©¸ÖC(j¿®)ÿï(g¿░u)╬╗Í├╝░┴¸│╠öÁ(sh¿┤)ô■(j¿┤)Á╚����í�����ú┐╔îì(sh¿¬)òr(sh¿¬)▒O(ji¿ín)┐Ïð▒╝▄▄çı¹ÖC(j¿®)▀\(y¿┤n)ððÃÚør╝░©¸ð▒╝▄▄çÁ─á¯æB(t¿ñi)��ú¼ÎÈäË(d¿░ng)╔·│╔▀\(y¿┤n)ððàóöÁ(sh¿┤)Á─ê¾(b¿ño)▒Ý▓ó¥▀Ëð╣╩ı¤Ëøõø��íóÜv╩ÀöÁ(sh¿┤)ô■(j¿┤)▓ÚÈâÁ╚╣ª─▄��íú
3.4 ╩ÍäË(d¿░ng)▓┘θ
* ╩ÍäË(d¿░ng)▓┘θ═¿▀^͸┴¯┐ÏÍãã¸▀M(j¿¼n)ðð���íúîª(du¿¼)╬╗�����íóÜw╬╗║═ÎÈäË(d¿░ng)▀\(y¿┤n)ðð░┤Ôoƒoðº�ú╗?
* ╩ÍäË(d¿░ng)▓┘θÀÍâ╔ÀNá¯æB(t¿ñi)ú¼plc àó┼c╗‗▓╗àó┼c��íúâ╔ÀNá¯æB(t¿ñi)©¨ô■(j¿┤) plc ╩ÃÀ±ı²│ú▀\(y¿┤n)ððÎÈäË(d¿░ng)ÃðôQ�íúÃ░ı▀│úË├Ë┌ÎÈäË(d¿░ng)▀\(y¿┤n)ððòr(sh¿¬)îª(du¿¼)─│éÇ(g¿¿)ð▒╝▄▄ç▀M(j¿¼n)ðð╚╦╣ñı{(di¿ño)ı¹ú¼ °║¾ı▀│úË├Ë┌ plc╣╩ı¤òr(sh¿¬)Á─┼Ròr(sh¿¬)▀\(y¿┤n)ðð��íú«ö(d¿íng) plc╣╩ı¤ú¿╗‗▒╗Ãð│²ú®òr(sh¿¬)���ú¼░▓ÐbÈ┌Á┌ 12┼_(t¿ói)Îâ¯lã¸╔¤Á─â╚(n¿¿i)▓┐┐ÏÍã┐¿îóÎÈäË(d¿░ng)¢Ë╣▄canopen¥W(w¿úng)����ú¼┤·╠µ plc▀M(j¿¼n)ðð╚½▓┐Îâ¯lã¸Á─▀\(y¿┤n)ðð▒O(ji¿ín)£y(c¿¿)���ú¼┤_▒úθÿI(y¿¿)░▓╚½��íúplc║═â╚(n¿¿i)▓┐┐ÏÍã┐¿Á─ÃðôQÍ╗─▄È┌ð▒╝▄▄ç╬┤▀\(y¿┤n)ððòr(sh¿¬)▀M(j¿¼n)ððú╗
* ╩ÍäË(d¿░ng)▓┘θòr(sh¿¬)�����ú¼ð▒╝▄▄çÁ─▀\(y¿┤n)ðð╦┘Â╚Ë╔͸┴¯┐ÏÍã㸢o│÷í�ú┐ı¦dòr(sh¿¬)ú¼┐╔ÊÈ▀M(j¿¼n)╚Ù╚§┤┼╦┘Â╚ú¿┐ı¦d©▀╦┘▀\(y¿┤n)ððú®���ú¼Äº¦d║¾�����ú¼plc╗‗â╚(n¿¿i)▓┐öU(ku¿░)ı╣┐¿îó¢¹Í╣╦¨Ëðð▒╝▄▄çÁ─╚§┤┼╦┘Â╚▀\(y¿┤n)ððú¿═¿▀^▀ë¦ï┴┐¦ö│÷Â╦ÎË║═└^Ùèã¸ã┴▒╬╚§┤┼¢o¿ð┼╠û(h¿ño)ú®╚þ╣¹Îâ¯lã¸═¿Ëì╣╩ı¤▒╗┼È┬Àð²Ôoã┴▒╬�ú¼plc╗‗â╚(n¿¿i)▓┐öU(ku¿░)ı╣┐¿îó▓╗àó┼c▀\(y¿┤n)ðð▒O(ji¿ín)£y(c¿¿)����íú▀@òr(sh¿¬)╩ÍäË(d¿░ng)▓┘θ╚È┐╔▀M(j¿¼n)ððú¼Á½╚§┤┼╦┘Â╚▒╗ÅÏÁ΢¹Í╣ú¿ƒoıôð▒╝▄▄ç╩ÃÀ±Äº¦dú®�����ú¼¤┬├µ¢Ú¢BÁ─ãäË(d¿░ng)╦┘Â╚¤ÌÀ¨�íó┴ª¥Ï▒O(ji¿ín)┐ÏíóÿO¤Ì╬╗Í├ı¹¾w£p╦┘║══ú▄çÁ╚╣ª─▄¥¨ƒoÀ¿îì(sh¿¬)¼F(xi¿ñn)�ú¼▓┘θåT▒ÏÝÜ╠ÏäeÛP(gu¿ín)Îó¤Á¢y(t¿»ng)▀\(y¿┤n)ððÁ─░▓╚½ðÈú╗
* ƒoıô plc╩ÃÀ±àó┼c���ú¼Îâ¯lã¸îó╩╝¢K═Â╚Ù����ú╗
* ╚þ╣¹plcàó┼cú¼ ð▒╝▄▄ç╬╗Í├Öz£y(c¿¿)¤Á¢y(t¿»ng)îóË├Ë┌ã┴─╗╔¤Á─ð▒╝▄▄ç╬╗Í├´@╩¥��ú╗ ╚þ╣¹plc▓╗àó┼c����ú¼╬╗Í├Öz£y(c¿¿)¤Á¢y(t¿»ng)îó▓╗ãθË├ú╗
* àó┼cθÿI(y¿¿)Á─ð▒╝▄▄ç▀xô±ú║═¿▀^í░╩ÍäË(d¿░ng)ð▒╝▄▄ç▀xô±Ú_ÛP(gu¿ín)í▒▀xô±ðÞʬàó┼cθÿI(y¿¿)Á─ð▒╝▄▄ç�����ú¼▒╗▀xÍðÁ─ð▒╝▄▄çîª(du¿¼)æ¬(y¿®ng)Í©╩¥ƒ¶┴┴�íúÁõð═ÁÏú¼┐╔ÊÈ▀xÍð╚½▓┐ 12┼_(t¿ói)ð▒╝▄▄ç╠ßÀ┼┤¾ð═┤¼Í╗����ú¼Ê▓┐╔ÊÈÍ╗▀xÍð 1┼_(t¿ói)ð▒╝▄▄çË├Ë┌▀\(y¿┤n)╦═╣ñ¥▀╗‗▓─┴¤ú╗
* ð▒╝▄▄ç│§╩╝╬╗Í├Á─îª(du¿¼)²RÀ¢╩¢ú║?
* ¤┬À┼θÿI(y¿¿)ú║ ┐╔ÊÈ═¿▀^͸┴¯┐ÏÍã㸢o│÷╚½¾w╔¤╔²├³┴¯��ú¼ ▀xÍðÁ─ð▒╝▄▄çÊÈͩ¿╦┘Â╚╔¤╔²���ú¼ÀÍäeÈ┌╔¤╔²£p╦┘╬╗Í├ÎÈäË(d¿░ng)£p╦┘��ú¼È┌═úÍ╣╬╗Í├ú¿╣ñ╦ç╬╗Í├ú®ÎÈäË(d¿░ng)═úÍ╣����ú╗
* ╠ß╔²Î¸ÿI(y¿¿)ú║¤┬À┼ð▒╝▄▄çÁ¢▀_(d¿ó)┤¾Í┬╬╗Í├║¾���ú¼îª(du¿¼)├┐┼_(t¿ói)ð▒╝▄▄çå╬¬Ü(d¿▓)ı{(di¿ño)ı¹����ú¼╩╣ãõÁ¢▀_(d¿ó)╣ñ╦çʬþÁ─îì(sh¿¬)ÙH╬╗Í├���ú╗
* ãäË(d¿░ng)╦┘Â╚¤ÌÀ¨ú║ð▒╝▄▄çÁ─▀\(y¿┤n)ðð╦┘Â╚═Û╚½Ë╔͸┴¯┐ÏÍãã¸Á─Ön╬╗øQ¿���ú¼Á½Äº¦dòr(sh¿¬)ú¼ð▒╝▄▄çÁ─▀\(y¿┤n)ðð╦┘Â╚È┌▀\(y¿┤n)ðð│§ã┌îó▒╗Â╠òr(sh¿¬)Úg¤ÌÀ¨�����ú¼ ð▒╝▄▄çÁ─╦┘Â╚║═╬╗Í├îóÈ┌┤╦òr(sh¿¬)ÚgÂ╬└´Á├Á¢│§▓¢ã¢║Ô��íú═¼òr(sh¿¬)�����ú¼Äº¦dòr(sh¿¬)╚§┤┼╦┘Â╚▒╗¢¹Í╣���ú╗
* ÿO¤Ì╬╗Í├ı¹¾w£p╦┘║══ú▄çú║ð▒╝▄▄çÁ─£p╦┘║══úÍ╣Ë╔▓┘θåT┐ÏÍã�����íúÁ½╚╬Ê╗┼_(t¿ói)ð▒╝▄▄çÁ¢▀_(d¿ó)ð²ÌD(zhu¿ún)¤Ì╬╗Ú_ÛP(gu¿ín)Á─╔¤¤┬£p╦┘╬╗Í├òr(sh¿¬)Â╝îóʲã╚½▓┐ð▒╝▄▄ç£p╦┘▓óË|░l(f¿í)ê¾(b¿ño)¥»ð┼╠û(h¿ño)�����ú╗ ╚╬Ê╗┼_(t¿ói)ð▒╝▄▄çÁ¢▀_(d¿ó)ð²ÌD(zhu¿ún)¤Ì╬╗Ú_ÛP(gu¿ín)Á─╔¤¤┬═úÍ╣╬╗Í├òr(sh¿¬)Â╝îóʲã╚½▓┐ð▒╝▄▄ç¥o╝▒═úÍ╣▓óË|░l(f¿í)ê¾(b¿ño)¥»ð┼╠û(h¿ño)��ú╗
* ┴ª¥Ï▒O(ji¿ín)£y(c¿¿)ú║╩ÍäË(d¿░ng)▓┘θòr(sh¿¬)����ú¼©¸ð▒╝▄▄çÁ─┴ª¥Ï╚È╚╗╩▄Á¢ plc╗‗â╚(n¿¿i)▓┐┐ÏÍã┐¿Á─▒O(ji¿ín)£y(c¿¿)íú┴ª¥Ï┤¾Ë┌¥»¢õÍÁ╗‗ðíË┌ÿO¤ÌÍÁîó«a(ch¿ún)╔·ê¾(b¿ño)¥»ð┼╠û(h¿ño)�����ú¼Á½¤Á¢y(t¿»ng)▓╗ò■(hu¿¼)ÎÈðð═úÍ╣ð▒╝▄▄çÁ─▀\(y¿┤n)ðð��ú╗
* ╦┘Â╚▒O(ji¿ín)£y(c¿¿)ú║╩ÍäË(d¿░ng)▀\(y¿┤n)ððòr(sh¿¬)���ú¼╚½▓┐ð▒╝▄▄çÁ─¢o¿╦┘Â╚╩äÓ═¼Á─��ú¼Ê╗Á®│÷¼F(xi¿ñn)▓╗═¼îóÊò×Ú╣╩ı¤��íú╩ÍäË(d¿░ng)▓┘θòr(sh¿¬)╚þ╣¹ðÞʬ╝mã½�����ú¼Í╗─▄═úÍ╣╚½▓┐ð▒╝▄▄ç▀\(y¿┤n)ðð║¾È┘îª(du¿¼)─│ð®ð▒╝▄▄ç▀M(j¿¼n)ððå╬äË(d¿░ng)ı{(di¿ño)ı¹���ú╗
3.5 ÎÈäË(d¿░ng)▀\(y¿┤n)ðð
* ÎÈäË(d¿░ng)▀\(y¿┤n)ðð═¿▀^îª(du¿¼)╬╗íóÜw╬╗║═ÎÈäË(d¿░ng)▀\(y¿┤n)ðð░┤Ôo▓┘θ�ú¼Í¸┴¯┐ÏÍã㸃oðºú╗
* àó┼cθÿI(y¿¿)Á─ð▒╝▄▄ç▀xô±ú║═¿▀^Ë|├■ã┴▀xô±ðÞʬàó┼cθÿI(y¿¿)Á─ð▒╝▄▄ç�ú¼▒╗▀xÍðÁ─ð▒╝▄▄çîª(du¿¼)æ¬(y¿®ng)Í©╩¥ƒ¶┴┴íúÁõð═ÁÏ���ú¼┐╔ÊÈ▀xÍð╚½▓┐12┼_(t¿ói)ð▒╝▄▄ç╠ßÀ┼┤¾ð═┤¼Í╗�ú¼Ê▓┐╔ÊÈÍ╗▀xÍð1┼_(t¿ói)ð▒╝▄▄çË├Ë┌▀\(y¿┤n)╦═╣ñ¥▀╗‗▓─┴¤���íú╩ÍäË(d¿░ng)ð▒╝▄▄ç▀xô±Ú_ÛP(gu¿ín)ƒoðº��ú╗?
* ¤Á¢y(t¿»ng)┤µÈ┌═¿Ëì╣╩ı¤òr(sh¿¬)▓╗È╩ÈS▀M(j¿¼n)ððÎÈäË(d¿░ng)▀\(y¿┤n)ðð����ú¼═¿Ëì╣╩ı¤┼È┬Àð²Ôoƒoðº�ú╗
* ð▒╝▄▄çÁ─îª(du¿¼)╬╗ú║░┤¤┬îª(du¿¼)╬╗░┤Ôo��ú¼▀xÍðÁ─ð▒╝▄▄çÊÈ╚§┤┼╦┘Â╚╔¤╔²�ú¼ÀÍäeÈ┌╔¤╔²£p╦┘╬╗Í├ÎÈäË(d¿░ng)£p╦┘�����ú¼È┌═úÍ╣╬╗Í├ú¿╣ñ╦ç╬╗Í├ú®ÎÈäË(d¿░ng)═úÍ╣�����íúplcËøõø▀@òr(sh¿¬)Á─ð▒╝▄▄çîì(sh¿¬)ÙH╬╗Í├�ú¼ÊÈ┤╦θ×Ú©¸ð▒╝▄▄çÁ─È¡³c(di¿ún)íúʬþ├┐┤╬θÿI(y¿¿)Ã░▀M(j¿¼n)ððÊ╗┤╬îª(du¿¼)╬╗�ú¼ÊȤ¹│²È¡³c(di¿ún)╬╗Í├ã½▓¯íúîª(du¿¼)╬╗▓┘θÍ╗È╩ÈSÈ┌┐ı¦dòr(sh¿¬)▀M(j¿¼n)ðð����ú¼╚þ╣¹Äº¦dú¼¤Á¢y(t¿»ng)îóê¾(b¿ño)╣╩ı¤��ú╗
* ð▒╝▄▄çÁ─Üw╬╗ú║ ð▒╝▄▄çÁ─ã╩╝╬╗Í├È┌Ë|├■´@╩¥ã┴ÈO(sh¿¿)Í├�����ú¼ ¤Á¢y(t¿»ng)ò■(hu¿¼)ÎÈäË(d¿░ng)Ëï(j¿¼)╦Ò¤Óæ¬(y¿®ng)Á─£p╦┘╬╗Í├íú░┤¤┬Üw╬╗░┤Ôo┐╔ÊÈ╩╣╚½▓┐ð▒╝▄▄çÊÈ╚§┤┼╦┘Â╚▀M(j¿¼n)╚Ùã╩╝╬╗Í├�íú Üw╬╗▓┘θÍ╗È╩ÈSÈ┌┐ı¦dòr(sh¿¬)▀M(j¿¼n)ððú¼╚þ╣¹Äº¦d�ú¼¤Á¢y(t¿»ng)îóê¾(b¿ño)╣╩ı¤ú╗
* ð▒╝▄▄çÁ─▀\(y¿┤n)ððú║░┤¤┬ÎÈäË(d¿░ng)▀\(y¿┤n)ðð░┤Ôo║¾���ú¼¤Á¢y(t¿»ng)▀M(j¿¼n)╚ÙÎÈäË(d¿░ng)▀\(y¿┤n)ððá¯æB(t¿ñi)�����ú╗
* ▀\(y¿┤n)ðð¢K³c(di¿ún)╬╗Í├È┌Ë|├■´@╩¥ã┴ÈO(sh¿¿)Í├ú¼¤Á¢y(t¿»ng)ÎÈäË(d¿░ng)Ëï(j¿¼)╦Ò¤Óæ¬(y¿®ng)Á─£p╦┘╬╗Í├����ú╗
* ÎÈäË(d¿░ng)▀\(y¿┤n)ððÍ©╩¥ƒ¶┴┴ú¼©¸ð▒╝▄▄çÁ─ã╩╝¢o¿╦┘Â╚×Úı{(di¿ño)ı¹╦┘Â╚���ú¼©¸ð▒╝▄▄çÁ─îì(sh¿¬)ÙH¢o¿╦┘Â╚║═╬╗Í├©¨ô■(j¿┤)¼F(xi¿ñn)ê÷(ch¿úng)ÃÚør═¿▀^ð▒╝▄▄çÁ─ØL¦å║═╗¼▓¯╠ÏðÈú¿┴ª¥Ï¥¨║Ô╣ª─▄ú®▀M(j¿¼n)ððÃ░ã┌ı{(di¿ño)ı¹����ú╗
* │§▓¢ı{(di¿ño)ı¹║¾����ú¼ð▒╝▄▄çÁ─╗¨£╩(zh¿│n)¢o¿╦┘Â╚╔¤╔²Á¢¯~¿▀\(y¿┤n)ðð╦┘Â╚ú¼©¸ð▒╝▄▄çÁ─îì(sh¿¬)ÙH¢o¿╦┘Â╚×Ú╗¨£╩(zh¿│n)¢o¿╦┘Â╚╝Ë£pÃ░ã┌ı{(di¿ño)ı¹òr(sh¿¬)½@Á├Á─ı{(di¿ño)ı¹ÍÁú╗
* È┌╔²╦┘▀^│╠Íð����ú¼¤Á¢y(t¿»ng)©¨ô■(j¿┤)îì(sh¿¬)ÙHÏô(f¿┤)¦d║═ί©▀ĺ¦d╦┘Â╚¤ÌÀ¨Ëï(j¿¼)╦Ò│÷È╩ÈSÁ─ί©▀▀\(y¿┤n)ðð╦┘Â╚ú╗
* È┌¯~¿▀\(y¿┤n)ðð╦┘Â╚ÀÇ(w¿ºn)¿▀\(y¿┤n)ðð║¾�ú¼¤Á¢y(t¿»ng)└^└m(x¿┤)╔²╦┘Á¢Î¯©▀▀\(y¿┤n)ðð╦┘Â╚▀\(y¿┤n)ððú╗
* È┌▀\(y¿┤n)ðð╚½▀^│╠����ú¼¤Á¢y(t¿»ng)©¨ô■(j¿┤)©¸ð▒╝▄▄çÁ─╬╗Í├ã½▓¯▓╗öÓ▀M(j¿¼n)ðð╝mã½╠Ä└Ýú╗
* ╚╬Ê╗┼_(t¿ói)ð▒╝▄▄çÁ¢▀_(d¿ó)£p╦┘╬╗Í├║¾��ú¼╚½▓┐ð▒╝▄▄çÁ─╗¨£╩(zh¿│n)╦┘Â╚¢o¿£p╦┘Í┴¥═╬╗╦┘Â╚�����ú╗
* ╚╬Ê╗┼_(t¿ói)ð▒╝▄▄çÁ¢▀_(d¿ó)¢K³c(di¿ún)╬╗Í├║¾����ú¼╚½▓┐ð▒╝▄▄ç═úÍ╣▀\(y¿┤n)ððú¼Ê╗┤╬θÿI(y¿¿)═Û│╔���íú╚þËð▒Ïʬ�����ú¼┐╔îª(du¿¼)▓┐ÀÍð▒╝▄▄ç▀M(j¿¼n)ðð╩ÍäË(d¿░ng)╬╗Í├ı{(di¿ño)╣Ø(ji¿ª)����ú╗
* È┌▀\(y¿┤n)ðð▀^│╠Íðú¼╚þ╣¹░┤¤┬ò║═ú░┤Ôo�����ú¼ð▒╝▄▄çîó═¿▀^£p╦┘ð▒ã┬═úÍ╣▀\(y¿┤n)ðð�����ú¼ÎÈäË(d¿░ng)▀\(y¿┤n)ððÍ©╩¥ƒ¶ÚW┴┴�íúÈ┘┤╬░┤¤┬ÎÈäË(d¿░ng)▀\(y¿┤n)ðð░┤Ôo║¾┐╔╗ÍÅ═(f¿┤)ÎÈäË(d¿░ng)▀\(y¿┤n)ðð�ú╗
* È┌▀\(y¿┤n)ððò║═úòr(sh¿¬)ÃðôQÁ¢ plcàó┼c▒O(ji¿ín)£y(c¿¿)Á─╩ÍäË(d¿░ng)▓┘θú¼ ÀÁ╗ÏÎÈäË(d¿░ng)▀\(y¿┤n)ðð║¾┐╔═¿▀^ÎÈäË(d¿░ng)▀\(y¿┤n)ðð░┤Ôo╗ÍÅ═(f¿┤)╔¤┤╬▀\(y¿┤n)ðð��íú░┤¤┬Üw╬╗�íóîª(du¿¼)╬╗░┤Ôoú¼╗‗È┘┤╬░┤¤┬ò║═ú░┤Ôoòr(sh¿¬)���ú¼▒¥┤╬ÎÈäË(d¿░ng)▀\(y¿┤n)ðð▀^│╠¢Y(ji¿ª)╩°�ú¼ÎÈäË(d¿░ng)▀\(y¿┤n)ððÍ©╩¥ƒ¶¤¿£þ�����íú
Á┌4ı┬ ¤Á¢y(t¿»ng)îì(sh¿¬)¼F(xi¿ñn)╣ª─▄╠ϳc(di¿ún)
* ð▒╝▄▄çÀâËË|¢^îª(du¿¼)îì(sh¿¬)òr(sh¿¬)╬╗Í├Öz£y(c¿¿)ú╗
* ═¼▓¢╬╗Í├╝mã½┐ÏÍã��ú╗
* ┐╔ͩ¿╚╬ÊÔ┼_(t¿ói)ð▒╝▄▄ç┬ô(li¿ón)║¤▀\(y¿┤n)ðð���ú╗
* ┐╔îì(sh¿¬)¼F(xi¿ñn)▀h(yu¿ún)│╠▓┘θ�íó╚½│╠╣ñθËøõø���íó▒O(ji¿ín)┐Ï��íó▀^¦d▒úÎo(h¿┤)�����íóÎȵi��íó╗ѵi����íó╗Ñ┐ÏåóäË(d¿░ng)����ú╗
* ┐╔▀M(j¿¼n)ðð▀h(yu¿ún)│╠���íó╩ÍäË(d¿░ng)║═ÎÈäË(d¿░ng)╣ª─▄ÃðôQú¼¥▀ËðÀ└Í╣ı`▓┘θ╣ª─▄���ú╗
* ┐╔┤¾┤¾╠ß©▀┤¼▓░╔¤¤┬╦«Á─╣▄└Ý╦«ã¢��ú¼È┌┐ÏÍã┼_(t¿ói)╔¤¥═┐╔îì(sh¿¬)òr(sh¿¬)▒O(ji¿ín)┐Ï┤¼¾w╔¤¤┬╦«Á─¼F(xi¿ñn)ê÷(ch¿úng)ÃÚør���ú╗
* ┐╔ÎÈäË(d¿░ng)┐ÏÍã¥ÝôP(y¿óng)ÖC(j¿®)Ïô(f¿┤)║╔Á─▀\(y¿┤n)ðð╦┘Â╚ú¼─▄╝░òr(sh¿¬)ı{(di¿ño)ı¹¥ÝôP(y¿óng)ÖC(j¿®)õô¢z└KÁ─ÚL(zh¿úng)Â╚����ú╗
* ┐╔ÊÈı{(di¿ño)ı¹ı¹éÇ(g¿¿)┤¼¾wÁ─ã¢║Ô╦«ã¢ú¼┤_▒ú©¸¯É┤¼¾w░▓╚½���íó┐╔┐┐íóã¢ÀÇ(w¿ºn)ÁÏ╔¤¤┬╦«�ú╗
* ┐╔È┌╦«¤┬ÚL(zh¿úng)ã┌ÀÇ(w¿ºn)¿▀\(y¿┤n)ððú╗
* ▓┘θ║å(ji¿ún)å╬���íó┐╔┐┐�����ú¼╣Ø(ji¿ª)╩íä┌äË(d¿░ng)┴ª╠ϳc(di¿ún)����íú
Á┌5ı┬ ¤Á¢y(t¿»ng)æ¬(y¿®ng)Ë├¯I(l¿½ng)Ë‗
íííí┤¼▓░¤┬╦«ð▒╝▄▄ç═¼▓¢ã¢║Ô┐ÏÍã¤Á¢y(t¿»ng)͸ʬË├Ë┌╩ß╩¢╗¼Á└ÖC(j¿®)ðÁ╗»┤¼▓░¤┬╦«┐ÏÍãú¼ðÌ┤¼ÅS╔¤┼┼ÐbÍ├�����íú
Ê╦▓²╦¸áûÁ┬ÎÈäË(d¿░ng)╗»┐ã╝╝Ëð¤Ì╣½╦¥
yichang sold automation technology co.ltd.
ÁÏÍÀú║║■▒▒Ê╦▓²╩ð©▀ð┬╝╝ðg(sh¿┤)Ú_░l(f¿í)à^(q¿▒)│Ãû|┤¾Á└10-6-108╠û(h¿ño)�����ú¼Ó]ı■¥Ä┤aú║443000